Forget bulky submersibles – Stanford's OceanOneK robot ushers in a new era of deep-sea exploration. This isn't your average ROV (Remotely Operated Vehicle); it offers a level of immersion that would make even Jacques Cousteau jealous (though maybe not ditch the beret just yet).
Imagine this: gliding past a sunken World War II fighter, feeling the texture of the coral with your fingertips, and experiencing the eerie silence of the deep – all from the comfort of a research vessel. OceanOneK's advanced haptics and vision systems bridge the human-ocean gap, allowing you to explore the abyss without that pesky pressure threatening to turn you into a human submarine.
OceanOneK is about to redefine our understanding of the deep sea, one robot handshake with a shipwreck at a time. (Although, let's be honest, robotic hands are still a work in progress, so maybe a high five for now).
Overview of OceanOneK's Expeditions
OceanOneK embarked on thrilling journeys across the Mediterranean Sea. Notable dive sites included the Beechcraft Baron F-GDPV aircraft, the Italian steamship Le Francesco Crispi, and the mysterious ocean floor near Cannes, France.
Significant Dive:
One of the most remarkable dives targeted the upper deck railing of the sunken Italian steamship, La Francesco Crispi. Showcasing an impressive depth of 500 meters below the Mediterranean's surface.

Experience:
Stanford roboticist Oussama Khatib described the sensation as if he was physically present, touching the shipwreck through OceanOneK's advanced haptic feedback. The realistic sensations created an unparalleled connection between man and machine, bringing the deep sea to life like never before.
Technology Behind OceanOneK
OceanOneK features a unique and sophisticated design that enhances its underwater maneuverability and operational capabilities.
Key Components:
| Component | Description |
|---|---|
| Humanoid Top Half | Mimics human upper body, enabling intuitive control and interaction with underwater objects. |
| Streamlined Back Half | Equipped with eight multi-directional thrusters for precise and agile underwater movement. |
| Haptic Feedback System | Provides realistic touch sensations, allowing operators to feel textures and resistance. |
| Stereoscopic Vision | Dual cameras create a three-dimensional view, giving operators a clear and immersive visual experience. |
OceanOneK's advanced haptic feedback and stereoscopic vision systems are designed to simulate the sensation of being underwater. These systems allow the operator to:
- Feel the textures and resistance of underwater objects.
- See the underwater environment in three dimensions, providing a realistic and immersive experience.

Through these cutting-edge technologies, OceanOneK bridges the gap between human perception and remote underwater exploration, enabling operators to interact with deep-sea environments as if they were physically present.
Key Moments and Achievements
OceanOneK's initial foray into the depths was part of an ambitious, multi-stop tour of the Mediterranean Sea, commencing in September 2021. This expedition marked several significant milestones in underwater exploration.
Mission:
The primary goal was to demonstrate OceanOneK's capabilities across various underwater sites, pushing the boundaries of robotic exploration.
Sites Visited:
| Site | Depth (meters) | Description |
|---|---|---|
| World War II P-38 Lightning | 40 | An iconic fighter aircraft from World War II, lying relatively shallow but providing rich exploration. |
| Le Protée Submarine | 124 | A sunken French submarine, offering a glimpse into mid-20th-century naval history. |
| 2nd-Century Roman Ship | 334 | An ancient Roman vessel in Aléria, Corsica, filled with historical artifacts. |
| Beechcraft Baron F-GDPV Aircraft | 67 | A light aircraft providing a modern-day exploration challenge. |
| Ocean Floor Near Cannes | 852 | The deepest dive in this expedition, testing the limits of OceanOneK's capabilities. |
Highlights:
World War II P-38 Lightning Aircraft (40m)
The initial dive was to a World War II P-38 Lightning aircraft, a significant artifact from naval aviation history. OceanOneK's precision and haptic feedback systems allowed detailed inspection of the aircraft's condition and structure.
Le Protée Submarine (124m)
The next target was Le Protée, a French submarine lost during World War II. This dive tested OceanOneK's ability to navigate and interact with complex underwater environments.
2nd-Century Roman Ship in Aléria, Corsica (334m)
This dive reached an ancient Roman shipwreck, providing valuable insights into maritime history and ancient shipbuilding techniques.
Beechcraft Baron F-GDPV Aircraft (67m)
OceanOneK explored the interior and exterior of this relatively modern aircraft, demonstrating its versatility and maneuverability in confined spaces.
Ocean Floor Near Cannes (852m)
The deepest dive of the expedition saw OceanOneK descending to 852 meters. Here, the robot encountered technical challenges, such as collapsed flotation devices around the communication and power line, which the team managed to overcome.

Experience:
During these dives, Stanford roboticist Oussama Khatib and his team utilized OceanOneK's advanced haptic feedback and stereoscopic vision systems. These features enabled them to feel the textures of underwater objects and perceive the depths in three dimensions, as if they were physically present.
The immersive experience provided by OceanOneK marked a significant advancement in underwater robotics, showcasing the potential for human-robot interaction in extreme environments.

Challenges Faced:
During the expedition, OceanOneK encountered several significant challenges, particularly at greater depths where the environment becomes increasingly hostile.
At 852 meters near Cannes, the robot faced a critical issue. The flotation devices surrounding the communication and power line collapsed under immense pressure, causing the line to become heavy and pile up on top of the robot. This unexpected weight threatened to immobilize OceanOneK, potentially jeopardizing the entire mission.
The Stanford Robotics Lab team demonstrated remarkable problem-solving skills and adaptability. They quickly devised a solution to manage the excess line.
By manually pulling in the slack from the communication and power line, the team was able to relieve the pressure on OceanOneK. This swift action allowed the robot to regain mobility and continue its dive, ensuring the success of the mission.
Commemorative Marker:
To commemorate OceanOneK's groundbreaking achievement of reaching and successfully operating at such extreme depths, the team placed a special plaque on the seabed. This marker symbolizes the technological and exploratory milestones achieved and marks the beginning of a new era in deep-sea exploration.
The plaque reads:
"A robot’s first touch of the deep seafloor.
A vast new world for humans to explore."
This commemorative plaque signifies OceanOneK’s role in pushing the boundaries of human knowledge and technological capability, highlighting the robot's historic contribution to underwater exploration.
OceanOneK's journey was filled with remarkable achievements and significant challenges. The robot's ability to overcome obstacles at such great depths demonstrates its robustness and the ingenuity of the Stanford Robotics Lab team. The placement of the commemorative marker serves as a lasting testament to the successful expedition and the new frontiers in deep-sea exploration that OceanOneK has opened up.
Deep Dive into OceanOneK: From Shallow Starts to Crushing Depths
Stanford's OceanOne wasn't always the ocean-conquering robot it is today. Initially designed for a leisurely 200-meter cruise, OceanOneK underwent a serious makeover to handle the big leagues – depths exceeding 1 kilometer.
This transformation involved a special suit of armor: a revolutionary foam infused with glass microspheres provided buoyancy while withstanding the crushing pressure. But that wasn't all. OceanOneK's arms received an oil and spring upgrade, essentially tiny internal submarines keeping the delicate electronics safe from the watery squeeze.
The team didn't stop there; they enhanced OceanOneK's dexterity with improved head and arm movement, and even added a selection of new "hands" developed by Stanford and the University of Pisa.
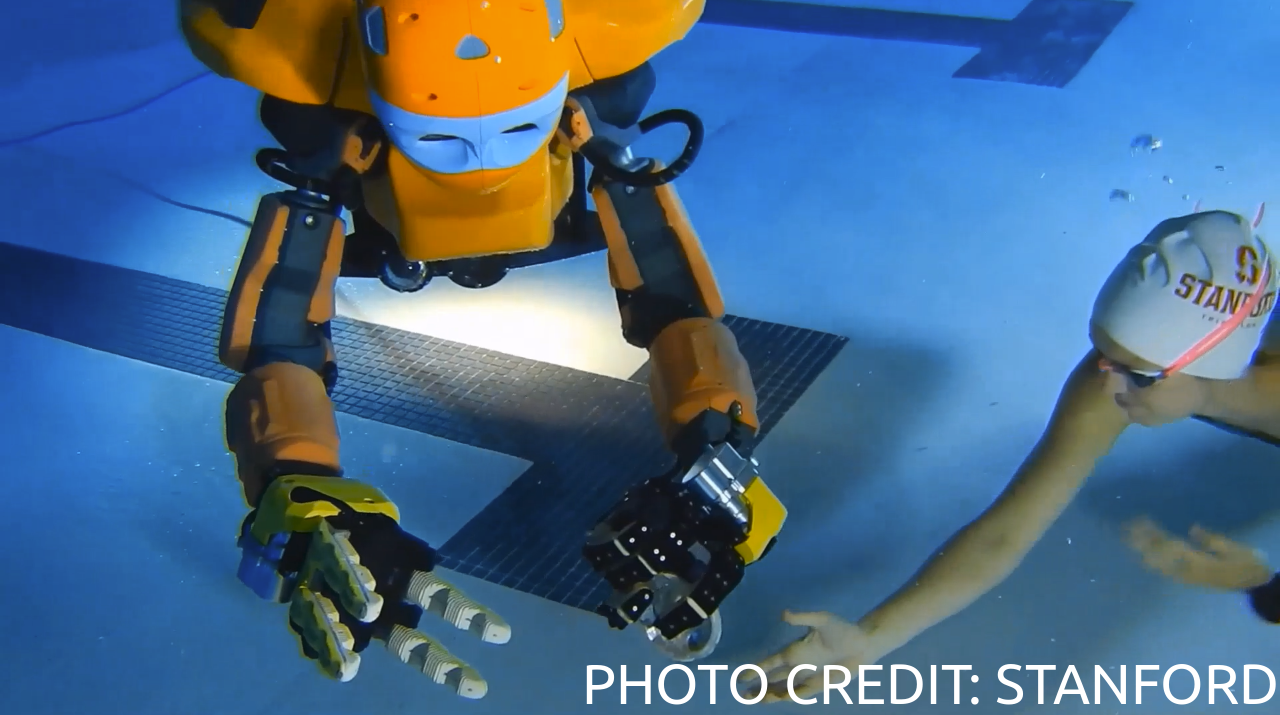
Testing the Waters: Perfecting the Dive
Before unleashing OceanOneK on the real ocean, the team put it through its paces in the familiar waters of Stanford's Avery Recreation Pool. It wasn't all sunshine and pool toys, though. Months of rigorous testing ironed out any kinks, ensuring seamless operation of the touch, control, and vision systems – crucial for that immersive deep-sea experience.

July Expedition: Reclaiming the Treasures of the Deep
Remember that pesky Roman ship from the first expedition, where the oil lamp retrieval went south? OceanOneK returned with a vengeance, successfully bringing back a handful of ancient vases – a testament to the robot's improved dexterity. They didn't stop there. The team also revisited the Crispi shipwreck, this time utilizing the boom camera to peek inside the fractured hull, revealing a fascinating display of underwater rust formations.
The OceanOne project showcases remarkable advancements in haptics, underwater robotics, and human-robot interaction. OceanOneK's humanoid design, equipped with multi-directional thrusters, advanced haptic feedback, and stereoscopic vision, offers an unprecedented level of immersion.
These technologies allow operators to experience underwater environments as if they were physically present, bridging the gap between human perception and remote exploration.
And remember, in the deep sea, it's always good to have a buddy... especially if that buddy is a robot who doesn't mind getting a little wet!🌊🤖