I am very confident that in the last few months, you heard the word AI so much that you no longer wonder what the acronym stands for. As a matter of fact, nowadays old and newcomers company are throwing their AI slide even when nothing of what they do is remotely connected with actual Artificial Intelligence.
In today’s robotics vernacular, we use the word robot interchangeably, from a Roomba to a Tesla humanoid robot. Without taking anything away from the Mr. Clean of the house, Roomba, there are a couple of Mars trips with a pit stop on Venus, between the challenge of designing one versus the other.
Upon user feedback via our Telegram channel, we are kicking off with this article a series of in-depth explorations on how things are made when it comes to robotics. Really twisting the thumbs of our marketing crew, this series is called: Humanoids.
I know, genius. Yah!
There are about seven critical steps for designing any form of humanoid. With the intent of not clouding your neurons in the first two paragraphs in summary, those steps are:
1. Concept and Design
2. Selection of Components
3. Construction of the Body (Mechanical Structure)
4. Electronics and Wiring
5. Programming
6. Testing
7. Rinse and repeat until things look right
The concept and design phase is where all robots begin their journey from idea to reality. It's an essential part of the process that lays the groundwork for everything that follows. This phase is critical to determining not just how the robot will look but also how it will function and operate in its intended environment.
To start, you need to identify the purpose and functionality of the robot. This step will guide all further design and development decisions. You need to ask questions like:
What task is this robot designed to perform?
Is it meant to interact with people, perform a specific job, or navigate a particular type of terrain? Each of these considerations will influence the design and what kind of components you are bound to use.
For example, a robot designed for underwater exploration will need to be waterproof and capable of withstanding pressure, while one designed for interaction with humans may need to have softer, more flexible parts and an appearance that is pleasing or at least non-threatening looking. Understanding the robot's purpose is fundamental. Not just for esthetics but to narrow the complexity of the parts and their abilities to perform tasks.
Once the purpose is clear, an initial sketch of the robot can be made. This can be as simple as a hand-drawn sketch or as complex as a 3D computer-rendered model.

This is where the physical dimensions of the robot start to take shape. Here, you can figure out the rough size and shape of the robot, where its major components, like the processor and power supply, will be located, and how many limbs or wheels it might have.
With the basic sketch complete, you can now move on to the detailed design. This is typically done using Computer-Aided Design (CAD) software. CAD allows you to create a precise 3D model of the robot. This is crucial not just for visualizing the final product but also for testing the robot's design virtually.
Interesting Fact About CAD
CAD software has a history that dates back to the 1960s. Ivan Sutherland, an American computer scientist, developed a program called Sketchpad in 1963 while he was a Ph.D. student at MIT. Sketchpad is considered the ancestor of modern CAD software. It was the first program that allowed a user to interactively design and manipulate geometric shapes directly on a computer screen, which was revolutionary for its time. Sutherland's innovative program laid the foundation for the multitude of CAD software we see today, making him a true pioneer in computer-aided design. This software has since transformed not only robotics but also architecture, engineering, animation, and many more industries.

You can simulate the robot's movement to see how it might interact with its environment and even perform stress tests to see how the robot's materials will withstand different forces.
There's one thing about physics simulators, but when it comes to testing limbs and, in particular, hands, complexity grows so much that simulators will always be a step (pun!) behind.
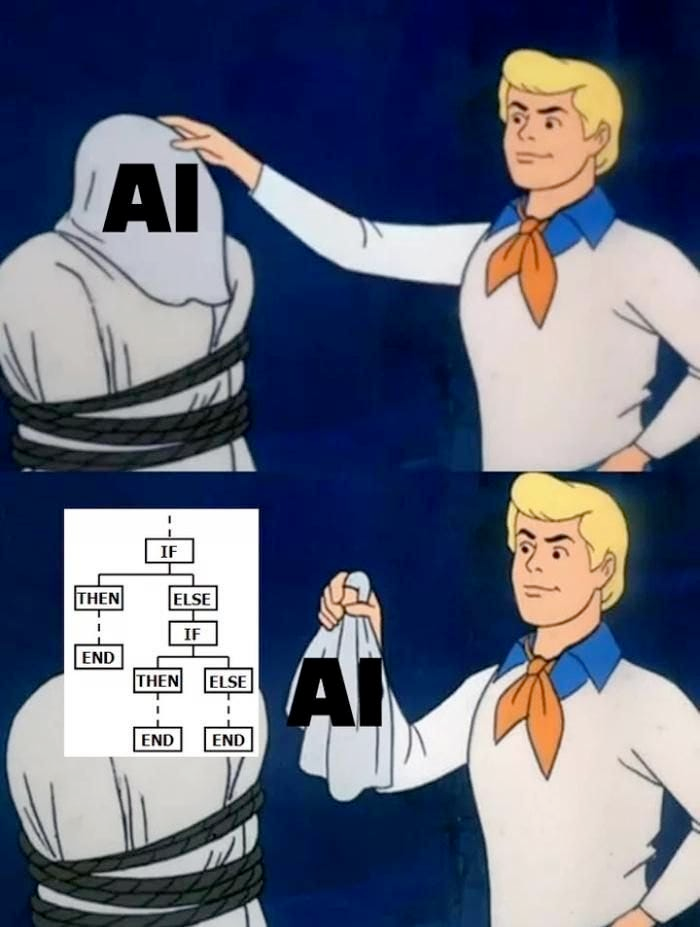
To put things in perspective, this is Digit, a humanoid in the making by Agility Robotics. Have a look at the video in this tweet to get a clue of what happen when the Digit grabs the empty box 😈 ❤️
That is damn impressive! all we need is cheap humanoid robots that researches/laymen can buy so they can do more experimentation with LLM+Robotics. This decade is when robotics industry, which was stuck in a perp cycle of reserach, really takes off and comes out of the lab
— Qamar Starkiller Okin (@QFC15) May 30, 2023
Although at the less savvy robotic eye, all bots appear to be the same, in reality, their exterior design frame a lot of their intended purpose. That's why in the lingo of mechanical engineering, that final goal "purpose" is driven by "design intent".
While many robots designed to help at home have a monoblock figure, like Anna

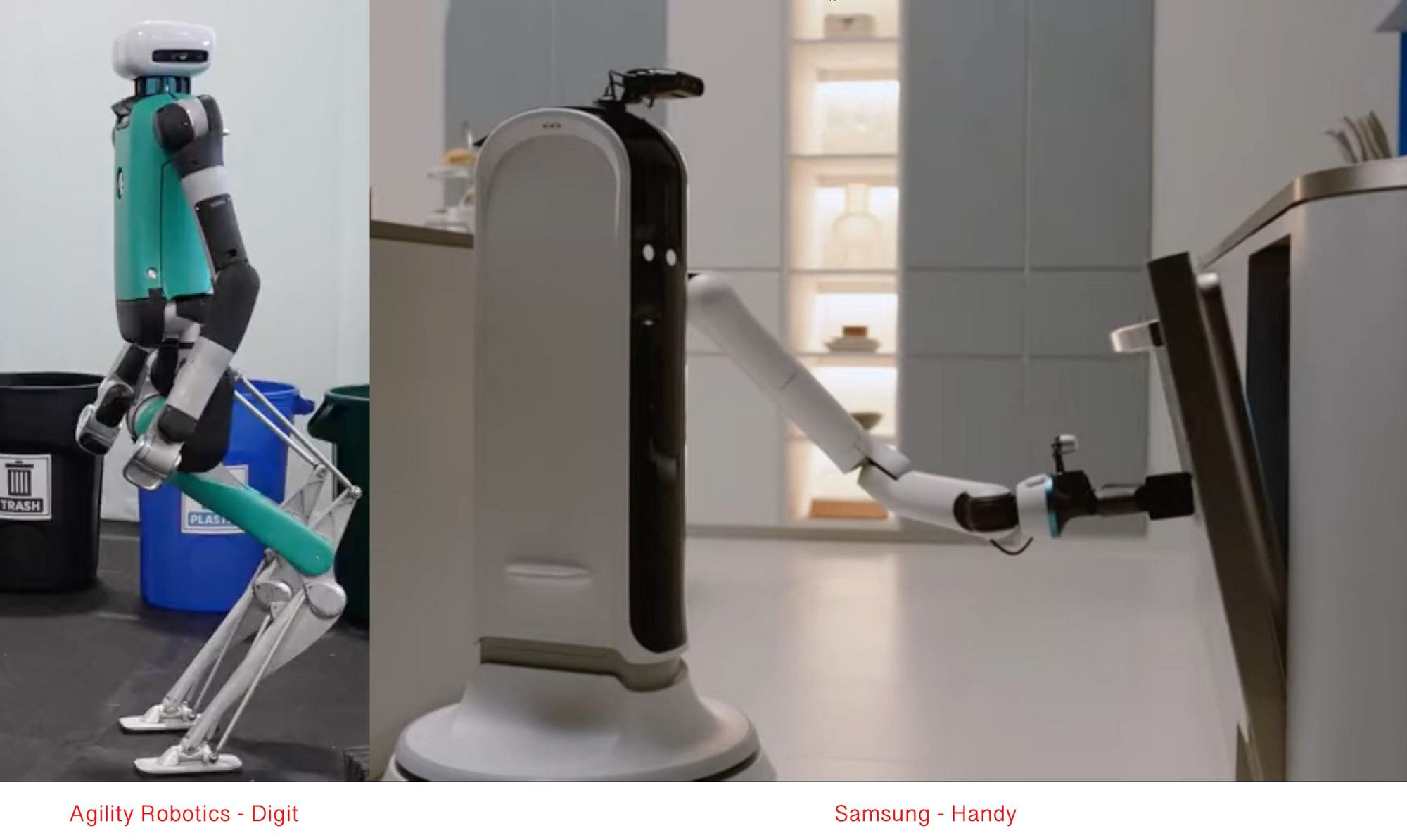
The more industrial humanoid robots have a “dressing code” that doesn’t expose too many wires/parts so that the weight and complexity of a dress aren’t clashing and increasing engineering challenges. Tesla Optimus is a great example of the latter.
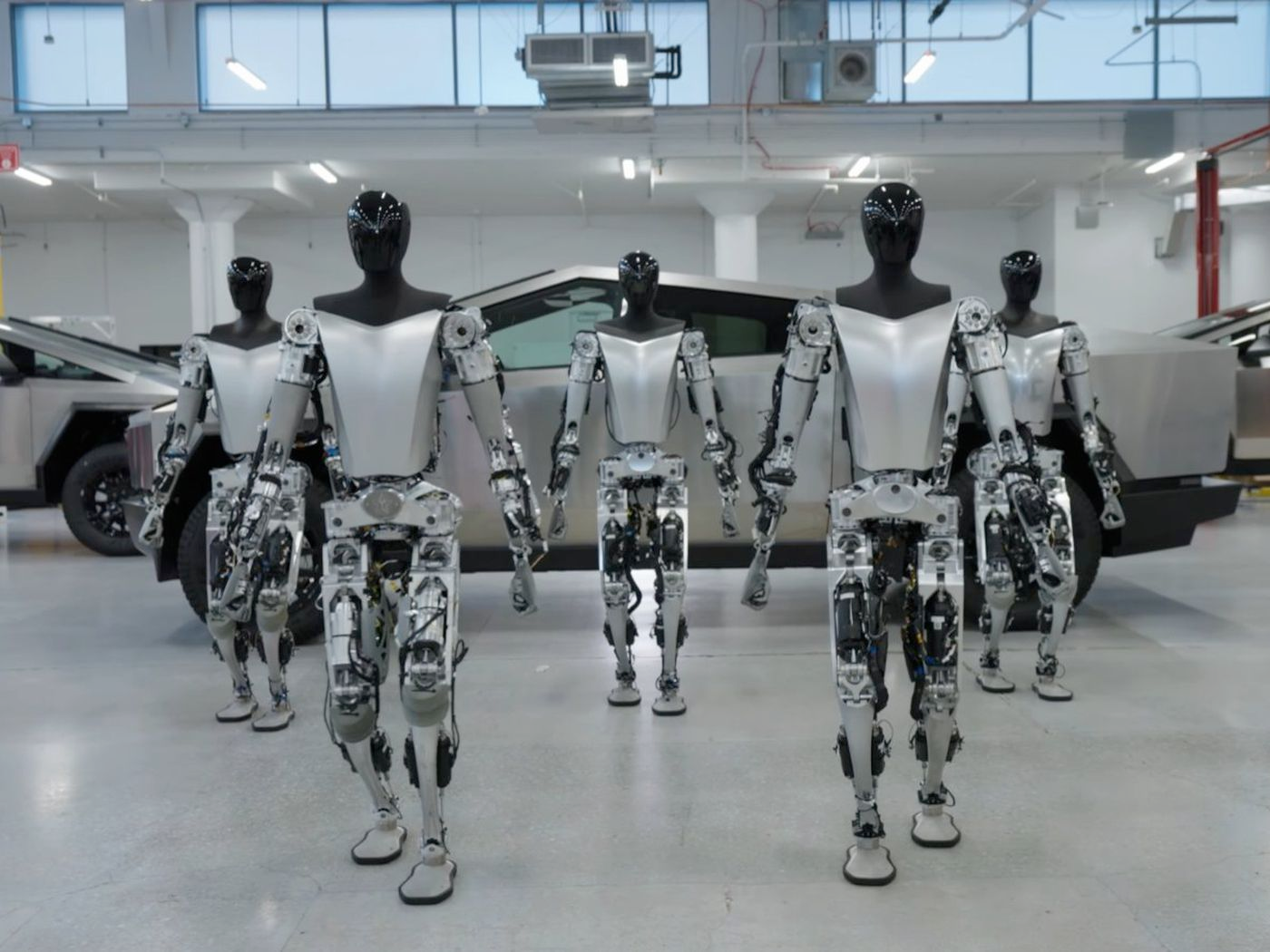
If you haven't seen them in action, here is your YouTube fix for you!
That's it for now. In the next episode, we will be exploring the incredible complexity of designing robotic hands for humanoids. The challenge is so many at once for designers and material engineers that it is not an accident that most bots don't have fingers 😅
Yes, Wall-E, that includes you and Eva!