

We have talked in the past on this blog about the complexity of creating hands for humanoids. If you missed that episode there's no shame in fixing that gap of knowledge now.
Complexity arises from the fact that human hands are incredibly complex, not just in the way they are designed but in the level of precision the brain manages to move each part without us even being able to compute the way. To that, add that we can sense what we are holding and, based on past experience, how much to squeeze to hold without breaking anything.
And that is just the tip of the actuator... because ice is not a thing for humanoids outside of Antarctica!
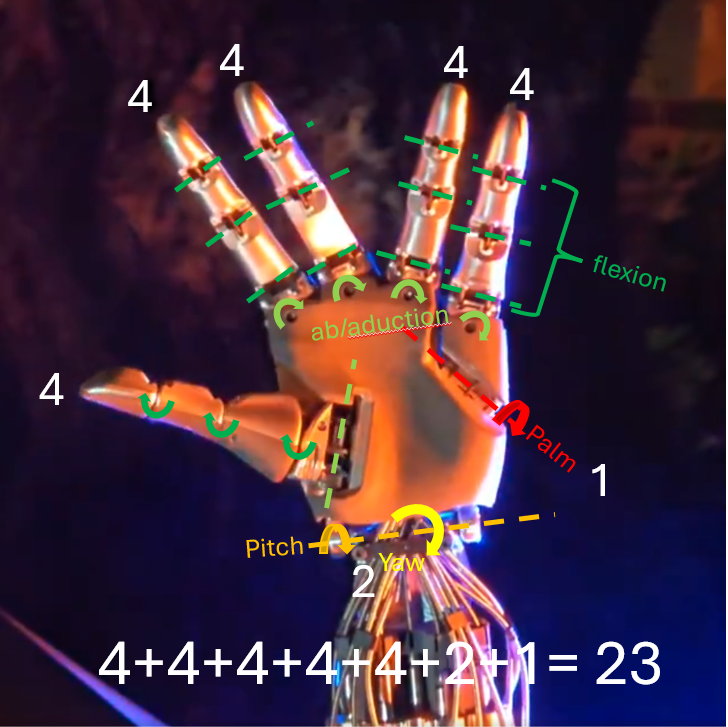
The engineering complexity compounds when to 20+ degree of freedom, you add the ability to handle heavy loads for long period of time and all at a price that doesn't tip the economic scale and manufacturability score. ⚖️
The Unitree bot and Tesla’s Optimus differ significantly in design, purpose, and capabilities. Unitree robots, focused on agility, speed, and dynamic mobility, often used for research, inspection, and recreational robotics.
In contrast, Optimus (also known as the Tesla Bot) is a humanoid robot designed for general-purpose tasks, particularly to assist in manual labor and eventually perform repetitive or dangerous tasks typically handled by humans.
While Unitree emphasizes fast movement and terrain adaptability, Optimus emphasizes human-like form and function, with advanced AI integration from Tesla’s self-driving stack for contextual task understanding and manipulation in human environments.

In the last 8 months, yes now we are measuring progress in quarters, gone are the times when the sentence would be "...last few YEARS", a tremendous amount of progress has been accomplished in the articulation space. Today, we are taking a look at what it appears to be the most likely European Humanoid to enter the EU next year. X1.
@blifemove The X1 humanoid’s hand design is notable for its use of a tendon-driven actuation system. Unlike many other humanoids where actuators (motors) are placed directly at the finger joints or within the hand, the X1 routes actuation power through tendons, which are controlled by motors located further up the arm, away from the hand itself. This approach enables a lighter and more compact hand, as the bulk of the mechanical complexity is shifted out of the hand and into the forearm or upper arm. Check the details on the blog for a much closer look!#botVerse
♬ original sound - The bLife Movement - The bLife Movement
X1 Humanoid Hand Design
Tendon-Driven Actuation
The X1 humanoid’s hand design is notable for its use of a tendon-driven actuation system. Unlike many other humanoids where actuators (motors) are placed directly at the finger joints or within the hand, the X1 routes actuation power through tendons, which are controlled by motors located further up the arm, away from the hand itself. This approach enables a lighter and more compact hand, as the bulk of the mechanical complexity is shifted out of the hand and into the forearm or upper arm.
Wrist and Finger Mechanics
- The wrist features a design similar to a Cardan or universal joint, providing multiple degrees of freedom: pitching (up/down), yawing (side-to-side), and rolling (rotation)[2].
- The wrist itself does not contain actuators; instead, the tendons transmit force from motors located higher in the arm, which allows the wrist to move smoothly and reduces the weight at the extremity.
- The hand and fingers are also tendon-driven, but specific details about the number of degrees of freedom or the exact mechanical layout are not fully disclosed, as 1X has intentionally obscured some of these details in public materials to protect their intellectual property.
Design Philosophy and Implications
- This tendon-driven approach mimics the biomechanics of the human hand, where muscles in the forearm control finger movement via tendons.
- By moving actuators away from the hand, the design allows for a more anthropomorphic and dexterous hand, potentially improving manipulation capabilities and energy efficiency.
- The design also appears to prioritize robustness and mechanical simplicity at the hand itself, which could reduce the risk of damage and make the hand safer and more adaptable for tasks in unstructured environments.
Comparison to Other Humanoid Hands
| Feature | X1 Humanoid Hand | Typical Humanoid Hand |
|---|---|---|
| Actuation | Tendon-driven, remote motors | Direct joint motors |
| Weight Distribution | Lighter hand, heavier forearm | Heavier hand |
| Mechanical Complexity | Complex tendon routing | Complex at the hand itself |
| Dexterity Potential | High (biomimetic) | Varies |
Summary
The X1 humanoid’s hand is distinguished by its tendon-driven actuation, with most motors placed away from the hand itself. This design enables a lightweight, dexterous, and human-like hand capable of complex manipulation, while also keeping sensitive and heavy components protected within the arm[2]. The exact details of the finger mechanisms remain proprietary, but the overall approach reflects a commitment to biomimicry and practical robotic dexterity.
If you are more into visuals, our friend Ballistic does a fantastic job as usual in showing the key parts of the X1 hand.

![From Tesla to BMW, humanoids are on their way [to your] home](/content/images/size/w300/2024/02/top_humanoids.png)
