The 1970s – a decade often remembered for disco, bell-bottoms, and lava lamps – was also a surprisingly fertile ground for technological leaps, especially in the burgeoning field of robotics. While a far cry from the sentient machines of science fiction, the innovations of this era laid the critical groundwork for the robots that assist us, explore for us, and work alongside us today. Let's take a deep dive into some of the most pivotal robotics projects and concepts that emerged during this dynamic decade.

this article has been historically our most referenced, therefore here is another take on the matter. Let us know what you think!
The Pioneers of Movement and Vision
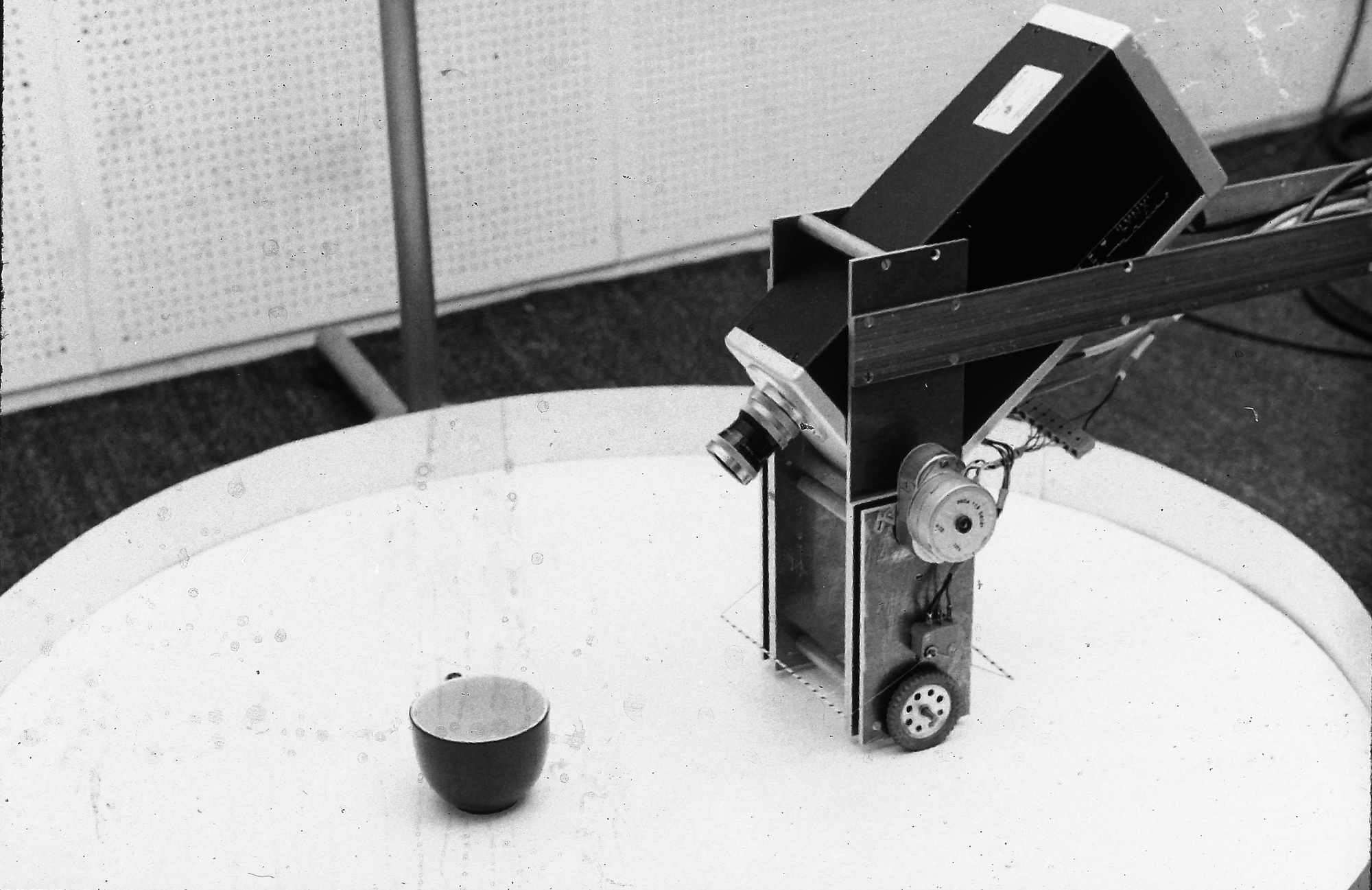
Long before self-driving cars became a common talking point, the Stanford Cart was already taking its first tentative rolls. Spanning roughly from 1960 into the early 1980s, this project was a true trailblazer.
Initially conceived to test the feasibility of controlling a lunar rover from Earth, it evolved into a landmark autonomous vehicle.
Navigating its surroundings with a single black and white camera – a remarkable feat for the time – the Cart's capabilities were later enhanced by Hans Moravec, who incorporated stereo vision between 1973 and 1980. Despite setbacks, like enduring damage from battery acid (🤯), the Stanford Cart's journey provided invaluable insights into visual navigation, proving that machines could indeed "see" and react to their environment.

Freddy II: The Assembly Artisan from Edinburgh
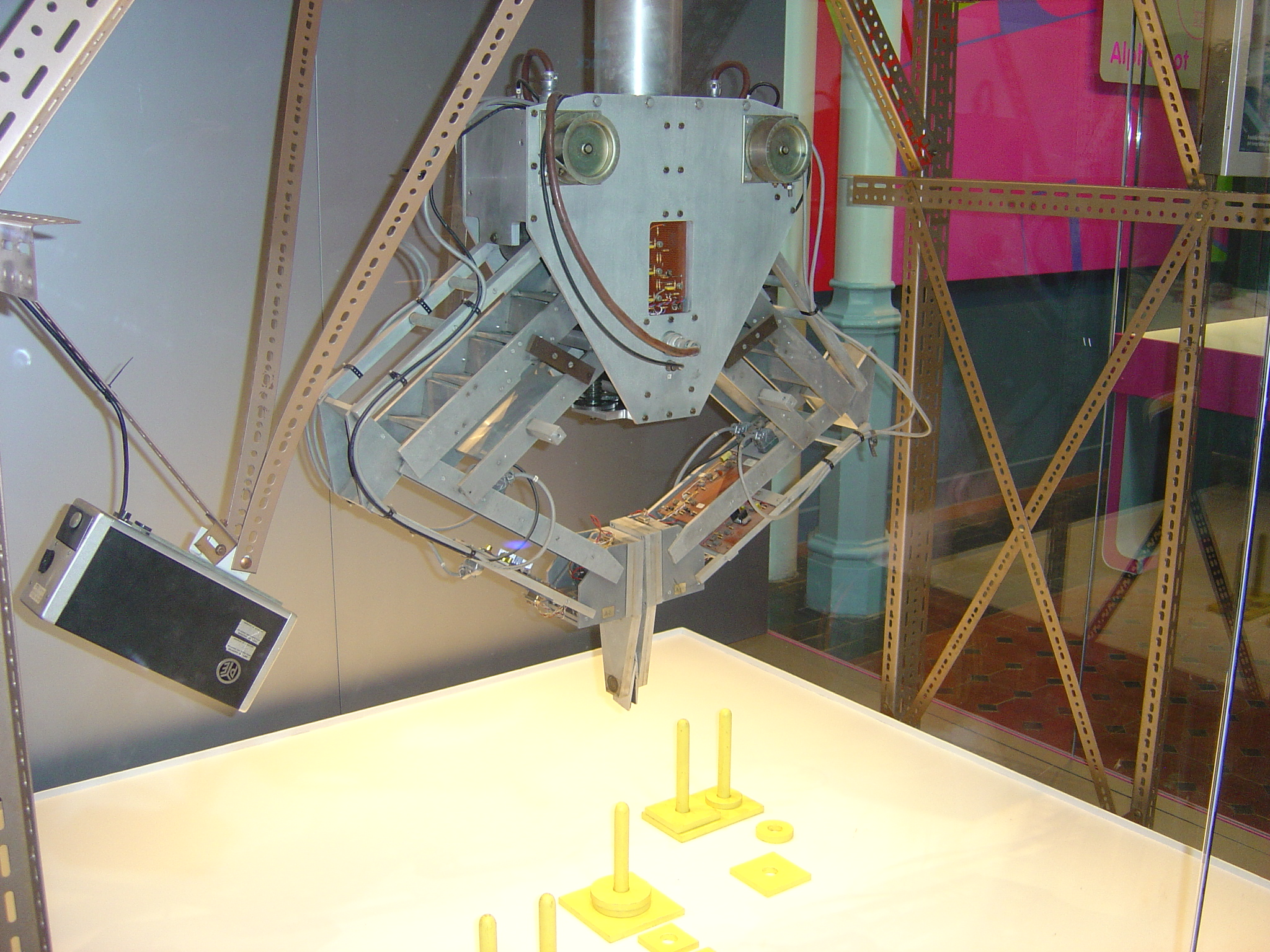
Across the Atlantic, at the University of Edinburgh, another remarkable robot named Freddy II was making waves throughout the 1970s. Freddy II wasn't just about movement; it was about manipulation and perception.
This clever machine gained fame for its ability to assemble wooden models, like a toy car and boat, from a disorganized heap of parts. Using its vision system to identify and locate components, Freddy II demonstrated early successes in hand-eye coordination for assembly tasks – a crucial step towards automated manufacturing and complex robotic interactions.
The Humanoid Dream and Industrial Might
WABOT-1: Japan's Humanoid Forerunner
In 1973, Waseda University in Japan unveiled WABOT-1, a creation that truly captured the imagination. It proudly stood as the world's first full-scale anthropomorphic robot.
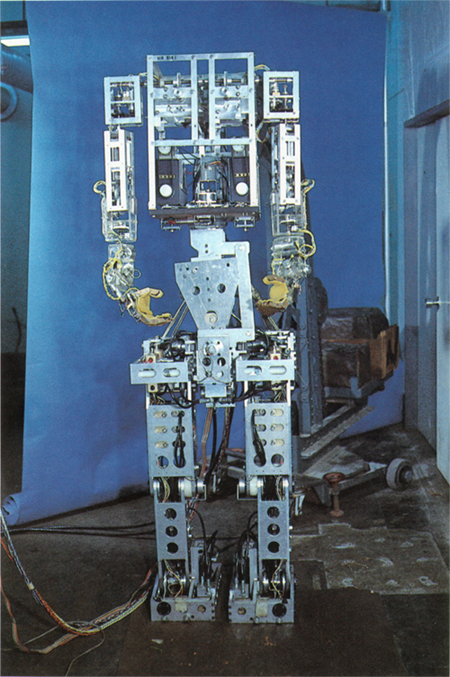
WABOT-1 could do more than just move; it could communicate in Japanese, measure distances and directions to objects, walk on two legs, and even grip items. While its cognitive abilities were likened to that of a one-and-a-half-year-old child, its existence was a monumental stride in humanoid robotics and the integration of artificial intelligence into physical forms.
Unimation's Unimate: The Robot That Went to Work
While some robots were learning to see and walk, others were already punching the clock. Unimation, founded in 1962 by the pioneering duo Joseph F. Engelberger and George Devol, holds the distinction of being the world's first robotics company.
Their flagship creation, the Unimate, became the first commercially successful industrial robot after being sold to General Motors in 1961 and deployed widely throughout the 70s. These powerful arms tirelessly performed grueling and dangerous tasks like die-casting and spot welding, revolutionizing the automotive industry and paving the way for the large-scale adoption of robotics in manufacturing.
Later in the decade, in 1978, Victor Scheinman (who also developed the Stanford Arm) designed the influential PUMA arm while at Unimation, further advancing industrial capabilities.

PUMA
The PUMA (Programmable Universal Machine for Assembly, or Programmable Universal Manipulation Arm), an industrial robotic arm developed by Victor Scheinman at Unimation, was initially produced for General Motors. The design, based on earlier Stanford University work, evolved into three series: 200, 500, and 700, each with distinct capabilities. The PUMA’s impact extended beyond manufacturing, featuring in films and theme park attractions.
Reaching for the Stars and Assembling the Future
NASA's Viking Program: Robots on the Red Planet
The 1970s also saw robots become interplanetary explorers. NASA's ambitious Viking Program sent two spacecraft, Viking 1 and Viking 2, to Mars. On July 20, 1976, Viking 1 achieved a historic milestone: the first successful U.S. landing on the Martian surface.
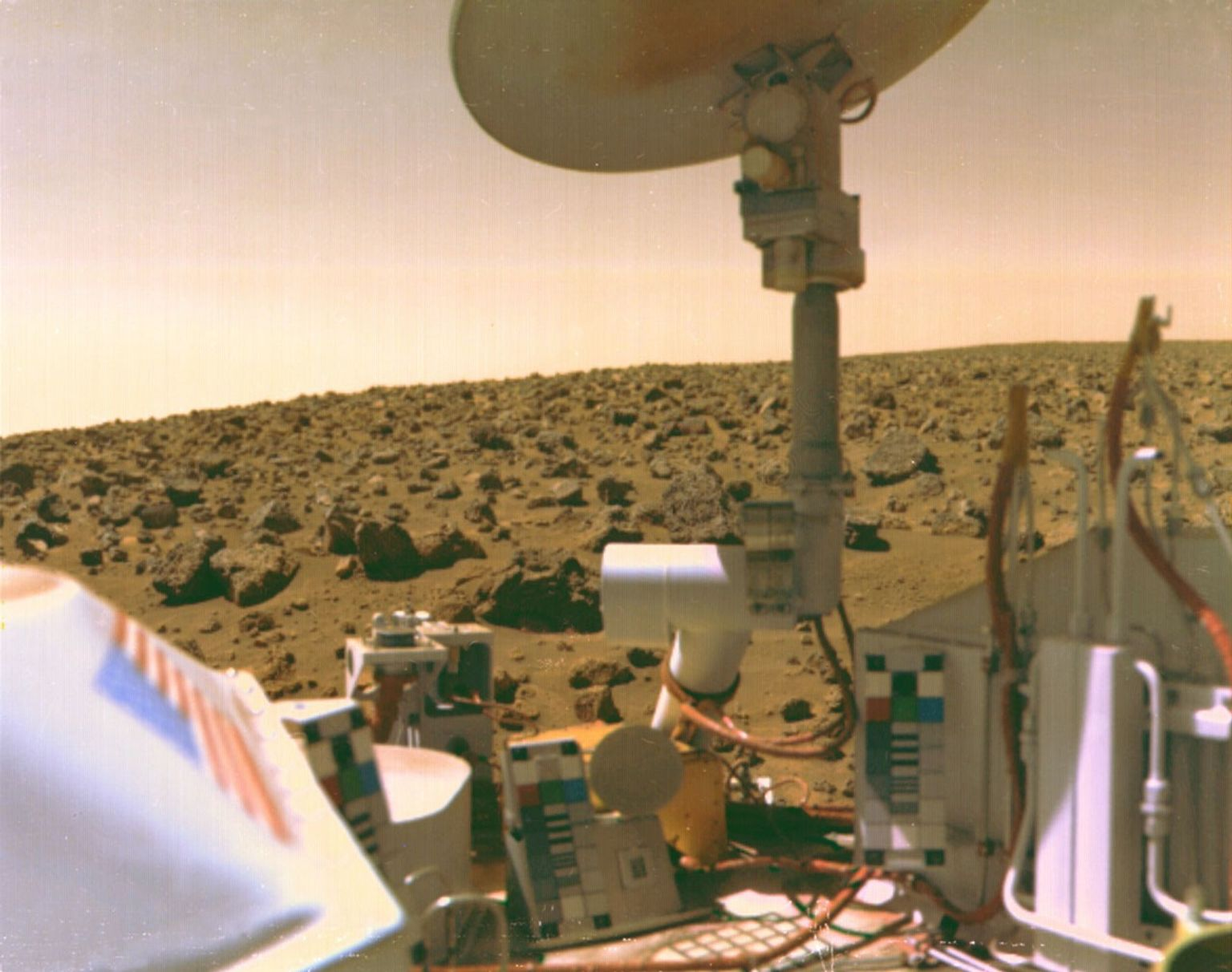
It didn't just land; it got to work. The landers were equipped with robotic arms that meticulously collected soil samples and conducted experiments, searching for signs of life and returning the very first images from the surface of Mars. This mission dramatically expanded our understanding of the Red Planet and showcased the incredible potential of robotics in space exploration.
Starship departs for Mars at the end of next year, carrying Optimus.
— gorklon rust (@elonmusk) March 15, 2025
If those landings go well, then human landings may start as soon as 2029, although 2031 is more likely. https://t.co/JRBB95sgNN
The Silver Arm: A Delicate Touch from MIT
Precision and finesse were the focus for the Silver Arm, designed by David Silver at MIT in 1974. This robotic arm wasn't about heavy lifting but about the intricacies of small-parts assembly.
Its standout feature was the use of feedback from delicate touch and pressure sensors. This allowed its movements to emulate the nuanced dexterity of human fingers, a critical development for tasks requiring high precision and a gentle touch.

back then was virtually possible to add touch sensors but they were so bulky that that would have made the inner application impossible. Nowadays, the top of the hands business arena (Figure AI, Tesla AI, X1 and Apollo) are employing every trick in the bag to not squish and destroy object that by their nature require a "woman touch".

The Toy That Brought Robotics Home
Tomy Omnibot: A Glimpse of Personal Robots
While many 70s robotic innovations were confined to labs and factories, the Tomy Omnibot series, which gained popularity primarily in the mid-1980s but had its conceptual roots and early buzz in the late 70s, aimed to bring a piece of the future into people's homes.

These charming toy robots, especially the Omnibot 2000, could carry light objects and even playback recorded command sequences and audio via a built-in cassette tape player. They captured the public's imagination and represented a significant push towards personal robotics, making the idea of a robot companion feel a little less like fiction.
The Underlying Advancements: Vision and Manipulation
Beyond these specific groundbreaking machines, the 1970s fostered crucial developments in the core technologies that empower robots.
A Leap in Robot Computer Vision: This decade saw foundational algorithms for robot computer vision, enabling machines to extract 3D structures from images and better understand scenes. Key figures like David Marr and Kunihiko Fukushima made significant contributions to this field.
This included breakthroughs in edge detection, line labeling, and object modeling. David Marr at MIT was a key figure, developing a bottom-up approach to scene understanding in 1978. Furthermore, Kunihiko Fukushima's Neocognitron, an early neural network from the 70s, drew inspiration directly from human neurobiology to process visual information.
Labeling what?!
Edge detection, line labeling, and object modeling are interconnected techniques in image processing and computer vision. Edge detection identifies boundaries in an image, while line labeling then identifies and labels these edges as lines. Object modeling uses this information, along with other features, to build a representation of the objects in the image, enabling tasks like object recognition and localization. Edge Detection:
- Purpose: To find the boundaries or edges of objects in an image.
- Techniques: Common algorithms include Canny edge detector, Sobel operator, and Laplacian operator.
- Mechanism: These algorithms detect abrupt changes in image intensity, often corresponding to object boundaries.
- Output: A binary or grayscale image highlighting the detected edges.
The Evolution of Early Robot Manipulators: Building on earlier successes like the Unimate, the 1970s saw continued refinement in robotic arms. These manipulators weren't just for factories; research explored their use in remote teleoperation for tasks in hazardous environments or even concepts for space exploration, such as robotic arms on space tugs. The design and control of the joints – the shoulders, elbows, and wrists of these machines – grew increasingly sophisticated, allowing for a wider range of motion and more complex tasks.

The Decade That Set the Stage
The 1970s were undeniably a pivotal period for robotics. From the first steps of autonomous navigation and the intricate assembly of objects to the heavy lifting in factories and the exploration of other worlds, the innovations of this decade were transformative.
They were the building blocks, the lessons learned, and the sparks of inspiration that fueled the rapid advancements in robotics we witness today. The groovy revolution was indeed a robotic one, quietly assembling the future, one gear and circuit at a time.
We hope you enjoyed this blast in the past and yet another testament that what you get today, was indeed seeded long before you harvested that juice new accomplishment.
I hope you found this article insightful. Before you leave,
please consider supporting The bLife Movement as we cover all robotic content and write for everyone to enjoy. Not just for machines and geeks.
Unlike many media outlets owned by billionaires, we are independent and prioritize public interest over profit. We aim for fairness and simplicity with a pinch of humor where it fits.
Our global journalism, free from paywalls, is made possible by readers like you.
If possible, please support us with a one-time donation from $1, or better yet, with a monthly contribution.
Every bit helps us stay independent and accessible to all. Thank you.
Mario & Victoria